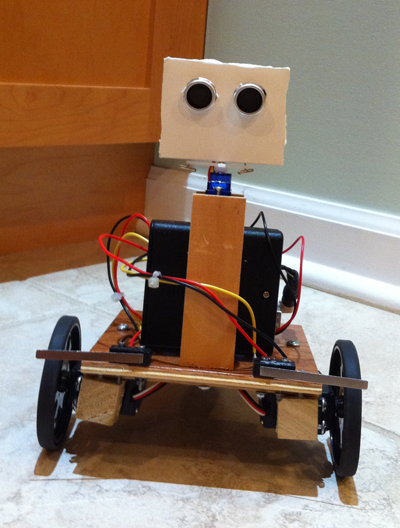
The tracking robot is an Arduino-based home-brew robot that moves towards a moving object, as detected by an ultrasonic range finder.
At present, it is pretty basic. It just detects walls and avoids them, mostly.
It uses a Ping))) ultrasonic range finder, mounted in a crudely cut piece of foam core, which is crudely pinned to the servo horn. My plan is to use basswood or something like that instead of the foam core, but I had some foam core and I wanted to test proof of concept.
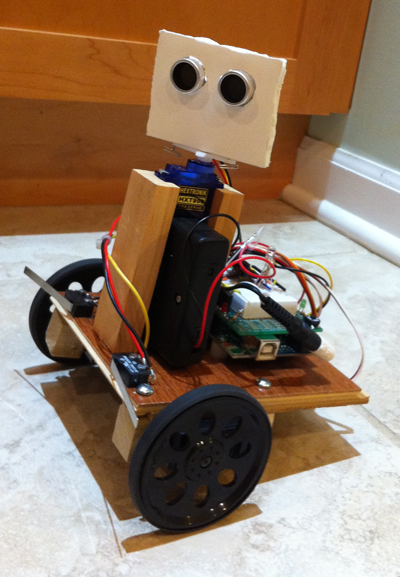
The base of the robot is a wood laminate floor sample, purchased from a hardware store for less than a dollar. Some poplar doweling is used to mount the wheel servos and to provide a vertical support for the sensor servo and also a holder for the battery pack, which contains four AA cells.
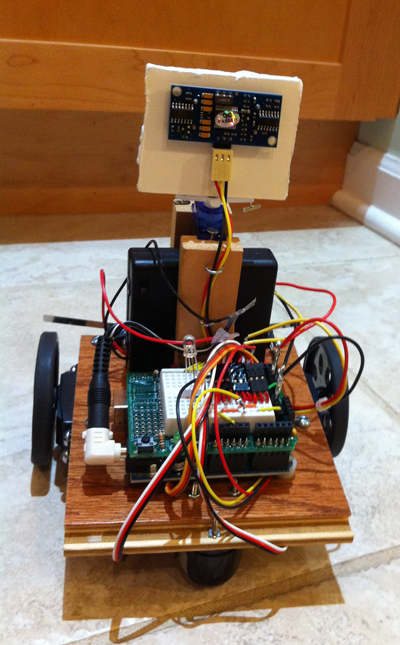
I used some nylon spacers to mount the Arduino duemilanove board and then mounted an Arduino protoshield onto that with a mini-breadboard glued to the protoshield. The protoshield brings the Arduino headers up and gives me several power and ground headers. There's an RGB LED on the board that I was using in an earlier version of this software for information. At the moment, it's unused. That may change.
I'd post a circuit diagram, but there's no mystery here. Everything is pretty much connected straight through. The PinAssignments.h file has the pin assignments for everything.
The source sketches are in a git repository.